TUC.Autonomous.Buzz – Sprint Update: It blinks. 🚐🤖✨
Two weeks ago, we said that our next milestone would be small, but important: We want to make it blink.
And here we are. 😊
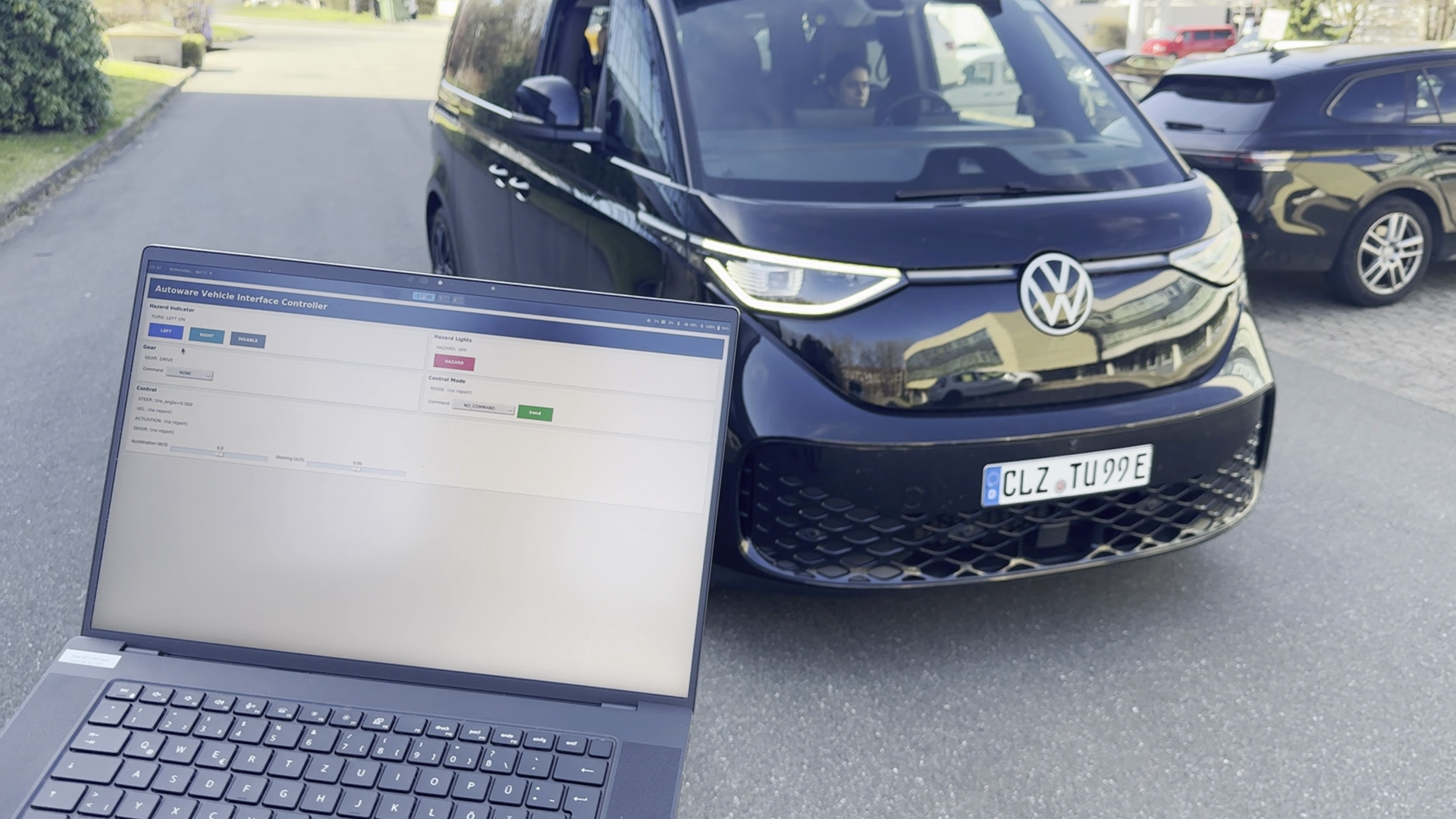
In the first sprint, the team implemented the first version of our Autoware Car Interface and connected it to the vehicle’s CAN interface.
This means that we can now control several comfort and non-driving functions of our research vehicle from our own software setup running on a laptop — via the Autoware Car Interface and the CAN interface of the vehicle.
The first visible results:
* Turn indicators.
* Hazard warning lights.
* Door opening.
* And other vehicle functions.
It may sound like a small step — but from an engineering perspective, it is an important milestone.
Because autonomous driving does not start with “the vehicle drives itself”.
It starts with reliable access to the vehicle platform, clean interfaces, controlled actuation, and a software architecture that allows us to gradually integrate more advanced AI-based functions.
The video shows the sprint result: our first interaction with the vehicle through our own control software.
The goal for the next sprint is already clear: We want to control the vehicle via the Autoware Car Interface using a joystick connected to our laptop.
Step by step, our TUC.Autonomous.Buzz is moving from a prepared vehicle platform towards an AI-autonomous research shuttle.
And one more thing: we are still looking for a name for our research vehicle.
Creative, technical, funny, bold — suggestions are very welcome. 😊
More updates soon.